
El cálculo de revoluciones del reductor para realizarlo, es necesario dividir la velocidad de entrada indicada en la placa del motor eléctrico por la relación de reducción del reductor. Si asumimos que su motor gira a 1400 revoluciones por minuto y que el reductor utilizado tiene una relación de transmisión de 10, la velocidad que obtendrá en el eje de salida será de 140 revoluciones. Esta operación matemática básica se basa en el principio de reducir la alta velocidad del eje de entrada mediante mecanismos de engranajes, aumentando así el par, y le permite determinar la velocidad ideal requerida por el sistema.
Al establecer el equilibrio mecánico del sistema, no solo es importante reducir la velocidad, sino también analizar correctamente la relación entre los engranajes. La relación entre el piñón pequeño en el eje de entrada y la rueda dentada grande en el lado de salida crea una transmisión de potencia que permite mover cargas mucho mayores sin sobrecargar el motor. El cálculo realizado requiere una comprensión adecuada de la dinámica interna de la caja de engranajes para garantizar un funcionamiento eficiente de la máquina y el ahorro energético.
En máquinas industriales o proyectos especiales, para seleccionar el reductor adecuado, además de determinar la velocidad de rotación, también se debe tener en cuenta la necesidad de par. Un cálculo incorrecto de las revoluciones puede provocar sobrecalentamiento del motor, bloqueo del sistema o que el mecanismo no alcance el rendimiento esperado. Por ello, después de determinar la velocidad de salida, se debe calcular también la fuerza de torsión requerida por el sistema e integrar el elemento de transmisión más adecuado.
Fórmula y lógica del cálculo de revoluciones del reductor
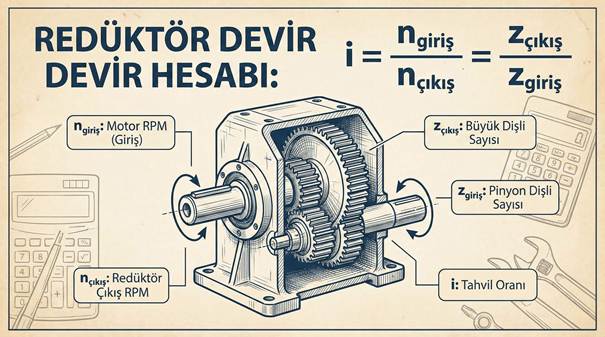
El cálculo de revoluciones del reductor se basa fundamentalmente en dividir la velocidad de entrada obtenida del motor eléctrico por la relación establecida en la caja de engranajes. El dato más importante en este proceso es la velocidad en revoluciones por minuto indicada en la placa del motor y la relación de transmisión especificada en el catálogo del reductor. Matemáticamente, al dividir la velocidad del eje de entrada por la relación de reducción, se obtiene la velocidad de salida del sistema. Este proceso, aunque parezca complejo, se basa en una proporción constante y es la forma más fiable de alcanzar la velocidad deseada en el diseño de máquinas.
El principio de funcionamiento del sistema se basa en las diferencias de diámetro y número de dientes entre los engranajes internos. Cuando un pequeño engranaje conectado al eje de entrada acciona una rueda mucho más grande, la velocidad disminuye mientras que el par aumenta en la misma proporción. Es decir, la reducción de velocidad no es una pérdida, sino una conversión de la energía en una forma útil de trabajo. Gracias a esta transformación mecánica, los motores de alta velocidad pero bajo par pueden adquirir la capacidad de mover cargas pesadas o transportar bandas lentamente.
Realizar un cálculo correcto es fundamental para la eficiencia y la durabilidad de los sistemas industriales. Una relación incorrecta puede provocar que la máquina funcione demasiado rápido y de forma incontrolada, o que no genere la fuerza necesaria y se detenga. En los cálculos de ingeniería, en lugar de centrarse únicamente en la velocidad, considerar también el par requerido por el sistema mediante un análisis de revoluciones garantiza el ahorro energético y evita el sobrecalentamiento del motor.
Cómo encontrar la relación de transmisión del reductor

El valor indicado normalmente con la letra "i" en la etiqueta del reductor expresa claramente la relación de transmisión del dispositivo. Este dato indica cuántas vueltas del eje del motor corresponden a una vuelta completa del eje del reductor. Si la etiqueta no es legible o se ha perdido, puede comprobarse dividiendo la velocidad conocida del motor por la velocidad real medida en el eje de salida con un tacómetro. El resultado obtenido revela la capacidad de reducción de velocidad del sistema y el coeficiente de aumento de par.
Si se prefiere trabajar a partir de la estructura mecánica, es posible obtener un cálculo preciso basándose en el número de dientes de los engranajes. Al dividir el número de dientes de la rueda dentada grande del reductor por el número de dientes del engranaje pequeño que la acciona, se obtiene la relación de transmisión.
En casos donde no se disponga de instrumentos de medición, se puede utilizar el método de giro manual. Marque ambos ejes, entrada y salida, y cuente cuántas vueltas da el eje de entrada mientras el eje de salida completa una vuelta. El número de vueltas del eje de entrada por cada vuelta del eje de salida corresponde directamente a la relación buscada. Este método práctico, muy utilizado en mantenimiento, permite obtener resultados rápidos sin necesidad de fórmulas complejas.
Ejemplos de cálculo de velocidad de salida del motor y reductor
En el proceso de cálculo, las variables principales siempre son la velocidad nominal del motor y la relación de transmisión del reductor. Aunque los valores de los motores eléctricos suelen ser estándar, la amplia variedad de relaciones de los reductores genera numerosas combinaciones. Alcanzar el resultado correcto dentro de esta variedad depende de colocar correctamente los datos en la fórmula. Esta etapa, donde la teoría se aplica en la práctica, influye directamente en el rendimiento del diseño de la máquina y la estabilidad del sistema.
Tomemos como primer ejemplo un motor asíncrono de 4 polos con una velocidad de 1400 rpm. Si se conecta un reductor con una relación de 20, el movimiento del eje se reduce considerablemente mientras que la transmisión de potencia aumenta. Dividiendo 1400 entre 20 se obtiene una velocidad de salida de 70 rpm. Este escenario es ideal para sistemas como líneas de embalaje o cintas transportadoras que requieren velocidad media y par constante.
Para situaciones que requieren movimientos más lentos y precisos, consideremos un motor de 6 polos de 900 rpm junto con un reductor con relación de 60. En este caso, al dividir la velocidad de entrada por la relación, el resultado es de 15 rpm. Esta baja velocidad se utiliza generalmente en mezcladores industriales, tanques de tratamiento de agua o sistemas de grúas que requieren alto par.
En algunos proyectos de ingeniería, el proceso funciona a la inversa y la velocidad final requerida es conocida desde el inicio. Por ejemplo, si el sistema debe girar a 100 rpm y se dispone de un motor de 3000 rpm, basta con dividir 3000 entre 100 para determinar que se necesita un reductor con relación de 30. Este método inverso es la forma más fiable de seleccionar el equipo adecuado durante la fase de diseño.
Estos cálculos teóricos son válidos para sistemas sin control de velocidad y conectados directamente a la frecuencia de red. Sin embargo, al utilizar un variador de frecuencia (inverter) y modificar la frecuencia del motor por debajo o por encima de 50 Hz, la velocidad de entrada cambia, por lo que el cálculo debe ajustarse a la velocidad actual del motor. Aunque en condiciones estándar las pérdidas mecánicas afectan mínimamente la velocidad, en sistemas de automatización de alta precisión es importante considerar estas desviaciones microscópicas.
Cómo calcular la velocidad en sistemas de poleas y correas
En los sistemas de poleas, el cambio de velocidad depende completamente de la relación física entre los diámetros. La diferencia entre la polea motriz y la polea conducida determina la velocidad final del sistema. En este caso, en lugar de contar dientes, se deben utilizar los valores de diámetro medidos en milímetros o centímetros. Como la transmisión no es un contacto rígido como en los engranajes, pueden producirse pequeñas diferencias debidas a la elasticidad de la correa, pero el principio matemático básico permanece constante.
Los pasos para determinar la velocidad de salida correcta en este sistema son los siguientes:
- Medir el diámetro de la primera polea conectada al eje del motor.
- Determinar el diámetro de la segunda polea en el lado de la carga.
- Anotar la velocidad del motor en revoluciones por minuto indicada en la placa.
- Multiplicar el diámetro de la polea motriz por la velocidad del motor.
- Dividir el resultado por el diámetro de la polea conducida.
- El valor obtenido representa la velocidad del eje de salida del sistema.
El éxito del cálculo en campo depende también de que la correa no patine sobre la polea y de que la tensión esté correctamente ajustada. Debe recordarse que al pasar de una polea pequeña a una grande la velocidad disminuye mientras el par aumenta significativamente. En el caso contrario, la velocidad aumenta pero la fuerza de rotación del eje disminuye. En diseño de ingeniería no basta con alcanzar la velocidad deseada; también es esencial garantizar el equilibrio del par.
Relación entre el cálculo de par del reductor y la potencia del motor
La relación entre la potencia del motor y el par obtenido en el eje es el núcleo de los sistemas mecánicos. Los motores eléctricos, por su naturaleza, giran a altas velocidades pero generan un par relativamente bajo. Los reductores intervienen en este punto reduciendo la velocidad mediante medios mecánicos y convirtiendo la energía perdida en par útil. Gracias a este principio inversamente proporcional, incluso un motor de baja potencia puede mover cargas de varias toneladas con la relación de engranajes adecuada.
En los cálculos de ingeniería se utiliza la constante 9550 para determinar esta conversión. Al multiplicar la potencia del motor (kW) por esta constante y dividirla por la velocidad de salida, se obtiene el par en Newton metro (Nm). Sin embargo, esta fórmula teórica no incluye pérdidas por fricción, por lo que en aplicaciones reales es necesario considerar la eficiencia del reductor. Este factor de eficiencia, que varía según el tipo y la calidad de los engranajes, indica cuánta energía se convierte realmente en trabajo útil.
Uno de los errores más comunes en el diseño de sistemas es centrarse únicamente en la potencia del motor. El valor realmente importante es el par necesario para mover la carga. Un motor excesivamente potente provoca desperdicio de energía, mientras que un sistema con par insuficiente puede bloquearse durante el arranque y dañar el motor. Para una transmisión de potencia ideal, es esencial analizar correctamente la inercia de la carga y seleccionar adecuadamente el conjunto motor-reductor.
