
Redüktör devir hesabını gerçekleştirmek için elektrik motorunun etiketinde yer alan giriş devrini redüktörün çevrim oranına bölmeniz gerekir. Motorunuzun dakikada 1400 devirle döndüğünü ve kullandığınız redüktörün tahvil oranının 10 olduğunu varsayarsak, çıkış milinden alacağınız hız 140 devir olacaktır. Bu temel matematiksel işlem, giriş milindeki yüksek hızın dişli mekanizmaları aracılığıyla düşürülerek torkun artırılması prensibine dayanır ve sistemin ihtiyaç duyduğu ideal hızı bulmanızı sağlar.
Sistemin mekanik dengesini kurarken sadece hızı düşürmek değil, aynı zamanda dişlilerin birbirine olan oranını doğru analiz etmek de büyük önem taşır. Giriş milindeki küçük dişli ile çıkış tarafındaki büyük dişli arasındaki bu ilişki, motorun zorlanmadan çok daha büyük yükleri hareket ettirmesine olanak tanıyan bir güç aktarımı yaratır. Yapılan hesaplama, makinenizin verimli çalışması ve enerji tasarrufu sağlaması için dişli kutusunun içindeki dinamiklerin doğru anlaşılmasını gerektirir.
Endüstriyel makinelerde veya özel projelerde doğru redüktör seçimi yapmak için devir sayısını netleştirdikten sonra tork ihtiyacını da göz önünde bulundurmalısınız. Yanlış yapılan bir devir hesabı motorun aşırı ısınmasına, sistemin kilitlenmesine veya mekanizmanın hedeflenen performansı verememesine yol açabilir. Bu nedenle çıkış devrini belirledikten sonra sistemin ihtiyaç duyduğu döndürme kuvvetini de hesaplayarak en uygun güç aktarım organını sisteme entegre etmelisiniz.
Redüktör Devir Hesabı Formülü ve Mantığı
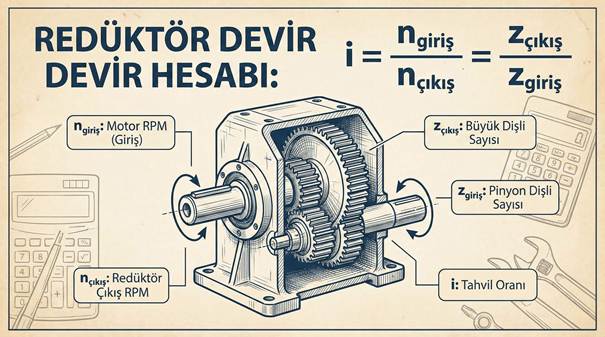
Redüktör devir hesabı, temelde elektrik motorundan alınan giriş hızının dişli kutusunun belirlediği orana bölünmesiyle ortaya çıkar. Bu işlemde en kritik veri, motor etiketinde yazan dakikadaki devir sayısı ile redüktörün kataloğunda belirtilen çevrim oranıdır. Matematiksel olarak ifade etmek gerekirse, giriş milindeki hızı tahvil oranına böldüğünüzde sistemin çıkış milinden elde edeceğiniz net dönme hızına ulaşırsınız. Karmaşık gibi görünen bu süreç aslında sabit bir orantı mantığına dayanır ve makine tasarımında istenilen hızı tutturmanın en garantili yoludur.
Sistemin çalışma mantığı, içerideki dişlilerin birbirleriyle olan çap ve diş sayısı farklarına dayanır. Giriş miline bağlı küçük bir dişli, kendisinden çok daha büyük olan bir çarkı döndürdüğünde hız düşerken tork adı verilen döndürme kuvveti aynı oranda artar. Yani devir sayısındaki düşüş bir kayıp değil, tam tersine gücün iş yapabilir forma dönüştürülmesidir. Bu mekanik dönüşüm sayesinde yüksek süratli ancak düşük torklu motorlar, ağır yükleri kaldırabilecek veya bantları yavaşça hareket ettirebilecek bir güce kavuşur.
Doğru hesaplama yapmak, endüstriyel sistemlerin verimliliği ve uzun ömürlü olması açısından hayati önem taşır. Yanlış belirlenen bir oran, makinenin gereğinden hızlı çalışarak kontrolsüzleşmesine ya da ihtiyaç duyulan kuvveti üretemeyip durmasına neden olabilir. Mühendislik hesaplamalarında sadece hıza odaklanmak yerine sistemin ihtiyaç duyduğu tork miktarını da göz önüne alarak yapılan bir devir analizi, enerji tasarrufu sağlarken motorun aşırı ısınmasını da engeller.
Redüktör Çevrim Oranı (Tahvil) Nasıl Bulunur?

Redüktör üzerindeki etikette genellikle "i" harfi ile gösterilen değer, cihazın çevrim oranını net bir şekilde ifade eder. Bu veri, motor milinin kaç tur dönüşünde redüktör milinin bir tam tur atacağını belirtir. Eğer etiket okunamaz durumdaysa veya kaybolmuşsa, motorun bilinen devir sayısını çıkış milinden takometre ile ölçtüğünüz gerçek hıza bölerek matematiksel sağlamasını yapabilirsiniz. Elde edilen sonuç, sistemin hız düşürme kapasitesini ve tork artış katsayısını ortaya koyar.
Mekanik yapı üzerinden gitmek isterseniz dişli sayılarını baz alarak kesin hesaplama yapmanız mümkündür. Redüktör içerisindeki dönen büyük dişlinin diş sayısını, onu hareket ettiren küçük dişlinin diş sayısına böldüğünüzde tahvil oranına ulaşırsınız.
Fiziksel sayım veya ölçüm aleti kullanamadığınız durumlarda ise manuel döndürme tekniği devreye girer. Giriş ve çıkış millerine birer işaret koyup, çıkış mili tam bir tur atana kadar giriş milini elinizle çevirip saymanız gerekir. Çıkışın tek bir turuna karşılık girişte attığınız tur sayısı, doğrudan aradığınız tahvil oranını verir. Özellikle bakım ve onarım süreçlerinde sıklıkla başvurulan bu pratik yol, karmaşık formüllere gerek kalmadan sahada hızlı çözüm üretmenizi sağlar.
Örneklerle Motor ve Redüktör Çıkış Devri Hesaplama
Hesaplama sürecinde temel değişkenler her zaman motorun nominal hızı ve dişli kutusunun aktarım oranıdır. Elektrik motorlarının etiket değerleri genellikle standart olsa da, redüktörlerin sunduğu geniş tahvil seçenekleri sayısız kombinasyon yaratır. Bu çeşitlilik içinde doğru sonuca ulaşmak, elinizdeki verileri formüle hatasız yerleştirmekten geçer. Teorik bilginin sahadaki pratiğe döküldüğü bu aşama, makine tasarımının başarısını ve sistemin kararlılığını doğrudan etkiler.
Yaygın kullanılan 1400 devir/dakika hızındaki 4 kutuplu bir asenkron motoru ele alarak ilk örneği inceleyelim. Bu motorun çıkışına tahvil oranı 20 olan bir redüktör bağlandığında, mil üzerindeki hareket ciddi oranda yavaşlarken güç aktarımı kuvvetlenir. 1400 sayısını 20 değerine böldüğünüzde, dakikada 70 devirlik net bir çıkış hızı elde edersiniz. Bu senaryo, genellikle paketleme hatları veya konveyör bantları gibi orta hızda ancak sürekli tork gerektiren sistemlerde ideal bir çözüm sunar.
Daha hassas ve yavaş hareket gerektiren durumlar için 900 devirlik 6 kutuplu bir motor ile tahvil oranı 60 olan bir redüktörün birlikteliğine bakmak gerekir. Burada giriş hızını orana böldüğümüzde, yani 900 bölü 60 işleminden sonra sonuç 15 devir/dakika olacaktır. Bu denli düşük bir hız, genellikle endüstriyel karıştırıcı mikserler, arıtma tesisi havuzları veya çok ağır yükleri kaldıran vinç sistemlerinde torkun maksimum seviyeye çıkarılması amacıyla tercih edilir.
Mühendislik projelerinde süreç bazen tersten işler ve makinenin ihtiyaç duyduğu nihai hız en baştan bellidir. Örneğin sistemin dakikada tam olarak 100 devirle dönmesi gerekiyorsa ve stoğunuzda 3000 devirlik seri bir motor varsa, kullanmanız gereken aktarma organını bulmak oldukça basittir. 3000 değerini hedeflediğiniz 100 değerine bölerek, 30 tahvil oranına sahip bir dişli kutusu seçmeniz gerektiğini belirlersiniz. Bu tersten sağlama yöntemi, tasarım aşamasında doğru ekipman tedariki yapabilmek için en güvenilir yoldur.
Kâğıt üzerindeki bu matematiksel işlemler, sürücü kullanılmayan ve doğrudan şebeke frekansına bağlı sistemler için kesin sonuçlar verir. Ancak bir hız kontrol cihazı (inverter) kullanarak motorun frekansını 50 Hz altına veya üstüne çektiğinizde giriş devri değişeceğinden, hesaplamayı o anki güncel motor hızına göre revize etmelisiniz. Standart bir çalışma düzeninde mekanik kayıplar devir sayısını ihmal edilebilir düzeyde etkilese de, çok hassas otomasyon işlerinde bu mikroskobik sapmaları da göz önünde bulundurmak profesyonel bir yaklaşım olacaktır.
Kasnak ve Kayışlı Sistemlerde Devir Nasıl Hesaplanır?
Kasnak mekanizmalarında hız değişimi, tamamen çapların birbirine olan fiziksel oranına dayanır. Motora bağlı olan döndüren kasnak ile işi yapan mil üzerindeki döndürülen kasnak arasındaki çap farkı, sistemin nihai hızını belirler. Burada dişli saymak yerine doğrudan milimetre veya santimetre cinsinden ölçülen çap değerlerini formüle yerleştirmek gerekir. Fiziksel temas yüzeyi dişlilerdeki gibi kilitli bir yapı olmadığı için hesaplamada teorik hız ile pratik hız arasında kayışın esnemesinden kaynaklı mikroskobik farklar oluşabilir ancak temel matematiksel mantık her zaman sabittir.
Bu sistemde doğru çıkış hızını bulmak için izlenmesi gereken adımlar şunlardır:
- Motor miline bağlı olan birinci kasnağın yani döndüren elemanın çapını ölçün.
- Yük tarafındaki ikinci kasnağın yani döndürülen elemanın çapını belirleyin.
- Elektrik motorunun etiketinde yer alan dakikadaki devir sayısını not edin.
- Döndüren kasnak çapı ile motor devrini birbiriyle çarpın.
- Elde ettiğiniz sonucu, hedefteki döndürülen kasnağın çapına bölün.
- Bulduğunuz nihai değer, sistemin yük tarafındaki milin dakikada kaç tur döneceğini gösterir.
Hesaplamanın sahadaki başarısı, kayışın kasnak üzerinde kaçırma yapmamasına ve gerginliğin doğru ayarlanmasına da bağlıdır. Küçük çaptan büyük çapa yapılan aktarımlarda devir düşerken torkun ciddi oranda arttığı, yani sistemin daha güçlü döndüğü unutulmamalıdır. Tam tersi bir senaryoda, yani büyük kasnaktan küçüğe hareket iletildiğinde ise hız artar ancak milin çevirme kuvveti zayıflar. Mühendislik tasarımlarında sadece hızı tutturmak yeterli değildir, makinenin yük altında bayılmaması için tork dengesini de bu çap oranlarıyla güvence altına almak şarttır.
Redüktör Tork Hesabı ve Motor Gücü İlişkisi
Motorun ürettiği güç ile milden alınan tork arasındaki ilişki, mekanik sistemlerin kalbini oluşturur. Elektrik motorları doğaları gereği yüksek devirde dönerken nispeten düşük bir döndürme kuvveti üretirler. Redüktörler tam bu noktada devreye girerek hızı mekanik yöntemlerle düşürür ve kaybolan hız enerjisini torka, yani iş yapabilen güçlü bir döndürme kuvvetine dönüştürür. Bu ters orantılı çalışma prensibi sayesinde, kilowatt değeri düşük bir motorla bile doğru dişli oranları kullanılarak tonlarca ağırlıktaki yükler yerinden oynatılabilir.
Mühendislik hesaplamalarında bu dönüşümü netleştirmek için 9550 sabit sayısı kullanılır. Motor gücünü (kW) bu sabit ile çarpıp sistemin çıkış devrine böldüğünüzde, milin uygulayacağı tork miktarını Newton metre (Nm) cinsinden elde edersiniz. Ancak bu teorik formül, sürtünme kaynaklı kayıpları içermediğinden gerçek hayattaki uygulamalarda redüktörün verim katsayısını da hesaba katmak şarttır. Dişli tipine ve kalitesine göre değişen bu verimlilik oranı, motorun ürettiği gücün ne kadarının kayıpsız bir şekilde işe dönüştüğünü gösteren en kritik parametredir.
Sistem tasarımı yaparken sadece motor etiketindeki beygir veya kilowatt gücüne odaklanmak en sık yapılan hatalardan biridir. Makinenin ihtiyaç duyduğu asıl değer, yükü hareket ettirecek olan tork miktarıdır. Gereğinden güçlü bir motor seçmek enerji israfına yol açarken, tork hesabı zayıf yapılmış bir sistem ise kalkış anında kilitlenerek motorun yanmasına sebep olabilir. İdeal bir güç aktarımı için yükün atalet momentini ve talep ettiği kuvveti doğru analiz edip, motor ve redüktör ikilisini bu ihtiyaca tam cevap verecek şekilde eşleştirmek gerekir.
